Linear Dynamical Systems
& Dynamic Mode Decomposition
From Eigenvalues to Data-Driven Dynamics
ML for Science and Engineering — Lecture 10
Schmid, "Dynamic mode decomposition of numerical and experimental data," J. Fluid Mech. 656, 2010
Brunton & Kutz, Data-Driven Science and Engineering, Cambridge UP, 2019
Coupled Oscillators
Two masses connected by springs: a classic linear system.
$m_2 \ddot{x}_2 = -k_2(x_2 - x_1) - k_3 x_2$
$m_1=m_2=1,\; k_1=k_2=k_3=1,\; x_1(0)=1,\; x_2(0)=0$
When Is a System Linear?
$\dot{\mathbf{x}} = A\,\mathbf{x}$
Coupled oscillators, circuits,
small perturbations, heat equation
$\dot{\mathbf{x}} = f(\mathbf{x})$
Pendulum (large angle), Lorenz,
Navier-Stokes, population dynamics
Eigendecomposition of $A$
Any square matrix can be decomposed as
Written out for an $n \times n$ matrix:
Mode shapes: how components move together
Growth rates: how fast each mode evolves
The Decoupling Trick
Starting from $\dot{\mathbf{x}} = A\mathbf{x}$, substitute $A = V\Lambda V^{-1}$:
Multiply both sides on the left by $V^{-1}$:
Define a new variable $\mathbf{z} = V^{-1}\mathbf{x}$, so $\dot{\mathbf{z}} = V^{-1}\dot{\mathbf{x}}$:
For symmetric $A$: $V^{-1} = V^T$, so the change of basis is just a rotation.
What Do Eigenvalues Tell Us?
For $z_i(t) = z_i(0)\,e^{\lambda_i t}$, the eigenvalue $\lambda_i$ controls the behavior:
Exponential growth
Exponential decay
Oscillation (± growth/decay)
Eigenvalue Plane
Click the complex plane to place an eigenvalue $\lambda$. See the resulting trajectory $z(t) = e^{\lambda t}$.
Example: Coupled Oscillators
For our spring-mass system with $m_1=m_2=1$, $k_1=k_2=k_3=1$:
The stiffness matrix $K$ has eigenvalues $\mu_i$ (stiffness per mode).
Natural frequencies: $\omega_i = \sqrt{\mu_i}$. System eigenvalues: $\lambda_i = \pm\, i\omega_i$.
$\mathbf{v}_1 = \begin{bmatrix} 1 \\ 1 \end{bmatrix}$ In-phase: both masses move together
$\mathbf{v}_2 = \begin{bmatrix} 1 \\ -1 \end{bmatrix}$ Out-of-phase: masses move oppositely
The full solution is a superposition:
With $x_1(0) = 1, x_2(0) = 0$: $c_1 = c_2 = \tfrac{1}{2}$
Back to $\mathbf{x}$: Superposition of Modes
The general solution in original coordinates:
The motion is their superposition.
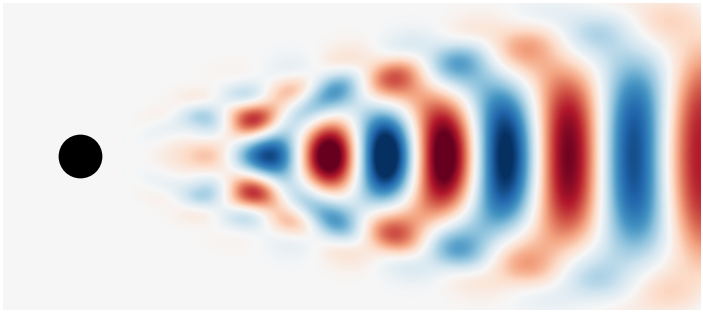
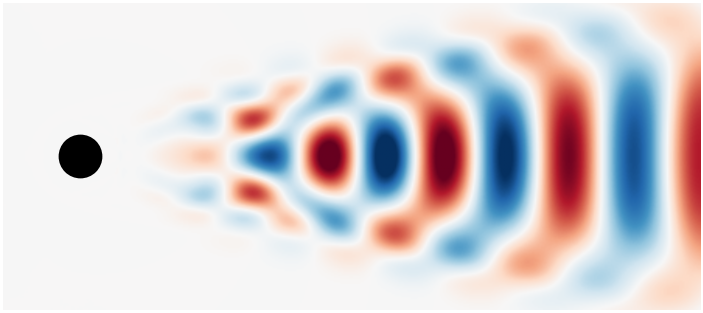
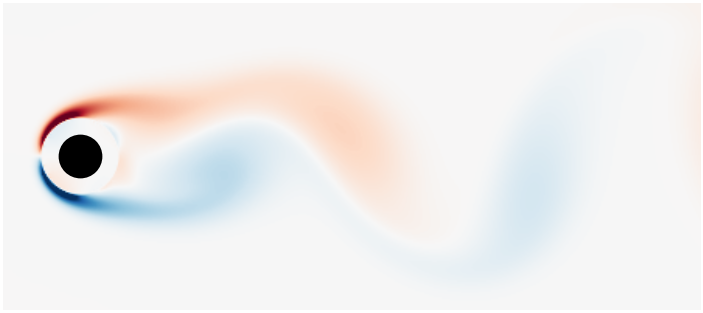
Flow Past a Cylinder
Fluid flowing past a cylinder produces vortex shedding: alternating vortices behind the obstacle.
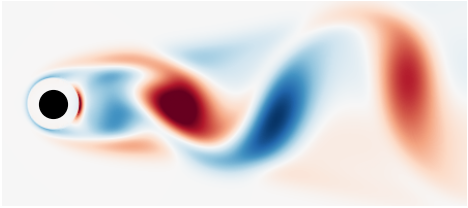
Mean-subtracted vorticity: oscillating vortex street
Each snapshot is a vector $\mathbf{x}_i \in \mathbb{R}^{89{,}351}$.
Brunton & Kutz, Data-Driven Science and Engineering, Cambridge UP, 2019
The Snapshot Matrix & Its SVD
Stack each snapshot as a column to form the data matrix $X$, then decompose it:
Truncated SVD: keep only the $r$ largest singular values (rank-$r$ approximation of $X$).
Orthogonal patterns in space, discovered from data. Each can be reshaped back to the spatial grid.
Ranked by energy: $\sigma_1 \geq \sigma_2 \geq \cdots \geq 0$. Measure how important each mode is.
How each spatial pattern evolves over time. Orthogonal time series.
Both in space ($\mathbf{u}_i$) and time ($\mathbf{v}_i$).
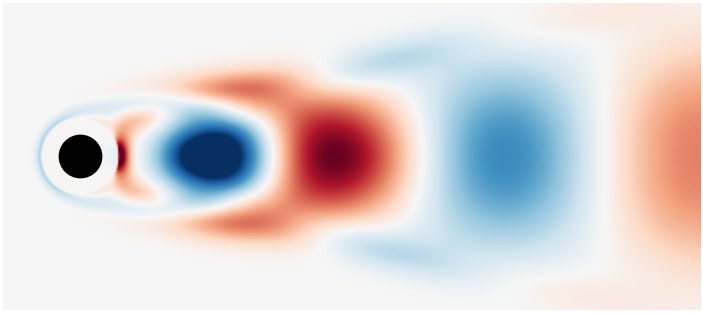
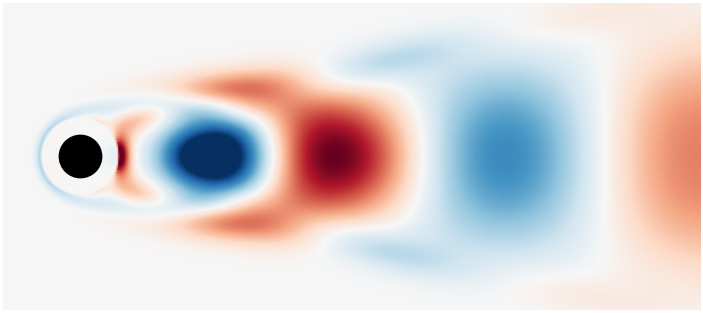
SVD Modes of the Flow
Spatial modes (columns of $U$, reshaped to 449×199)
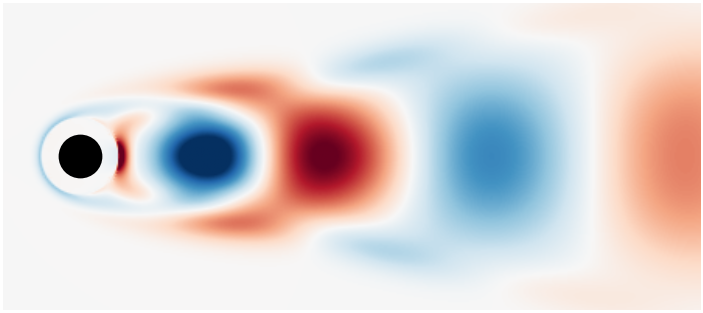
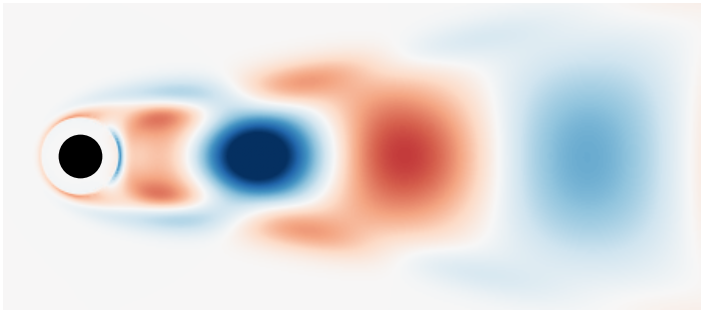


Each $\mathbf{u}_i \in \mathbb{R}^{89{,}351}$ is reshaped to 449×199 for display. Orthogonal, ranked by $\sigma_i$.
Temporal modes $\sigma_i \mathbf{v}_i^T$ (weighted rows of $V^T$)
→ Dynamic Mode Decomposition
From Time Series to a Dynamical Model
If the dynamics are (approximately) linear, then each snapshot maps to the next:
Stack snapshots into two matrices:
One-step-forward matrix:
Solving for $A$
If $X' = AX$, how can we recover $A$?
We need some kind of "inverse" of $X$, but $X$ is rectangular ($n \times (m{-}1)$).
The pseudo-inverse $X^\dagger$ gives the least-squares solution:
Using the SVD $X = U\Sigma V^T$, the pseudo-inverse is $X^\dagger = V\Sigma^{-1}U^T$, so:
We cannot even store it, let alone eigendecompose it. We need a smarter approach.
The Low-Rank Projection
If the data lives in a low-dimensional subspace, we don't need the full $A$. Project onto the dominant $r$ SVD modes:
We want eigenvectors of $A$, but $A$ is $n \times n$. Instead, define a reduced operator:
$U_r$ projects from $\mathbb{R}^n$ into the $r$-dimensional subspace; $U_r^T$ projects back. $\tilde{A}$ is only $r \times r$.
Substituting $A = X' V \Sigma^{-1} U^T$ and truncating:
SVD Spectrum: Low-Rank Structure
Does the cylinder flow data actually have low-rank structure? The SVD spectrum of $X$ confirms it:
DMD: Steps 1–2
$X = U\Sigma V^T$ → truncate to rank $r$
This identifies the $r$-dimensional subspace where the dynamics live.
$\tilde{A} = U_r^T\, X'\, V_r\, \Sigma_r^{-1}$
$\tilde{A}$ is $r \times r$ — it captures how the system evolves within the dominant subspace.
DMD: Steps 3–4
$\tilde{A}\, W = W\, \Lambda$
$W$ = eigenvectors of $\tilde{A}$, $\Lambda = \text{diag}(\lambda_1, \ldots, \lambda_r)$. This is cheap: only $r \times r$.
$\Phi = X'\, V_r\, \Sigma_r^{-1}\, W$
Each column $\boldsymbol{\phi}_i$ is a spatial pattern in the original $n$-dimensional space.
Dynamic Mode Decomposition in Python
def DMD(X, Xprime, r):
# Step 1: SVD of X, truncate to rank r
U, S, Vt = np.linalg.svd(X, full_matrices=False)
Ur, Sr, Vtr = U[:, :r], np.diag(S[:r]), Vt[:r, :]
# Step 2: Project dynamics onto SVD basis
Atilde = Ur.T @ Xprime @ Vtr.T @ np.linalg.inv(Sr)
# Step 3: Eigendecomposition of reduced operator
Lambda, W = np.linalg.eig(Atilde)
# Step 4: Recover full-space DMD modes
Phi = Xprime @ Vtr.T @ np.linalg.inv(Sr) @ W
return Phi, Lambda
The DMD Reconstruction
DMD gives us modes $\boldsymbol{\phi}_i$, eigenvalues $\lambda_i$, and amplitudes $b_i$.
A coherent spatial pattern (like an eigenface for dynamics).
$|\lambda_i|$ controls growth/decay. $\angle\lambda_i$ is the oscillation frequency. We use $\lambda_i^t$ (not $e^{\lambda t}$) because this is discrete-time: snapshots at integer steps.
How much each mode contributes. Computed from the initial condition: $\mathbf{x}_1 = \Phi\,\mathbf{b}$, so $\mathbf{b} = \Phi^\dagger \mathbf{x}_1$.
Continuous: $e^{\lambda t}$ (imaginary axis = stability)
Discrete: $\lambda^t$ (unit circle = stability)
Connected by $\lambda_{\text{cont}} = \frac{\ln \lambda_{\text{disc}}}{\Delta t}$
DMD Eigenvalues
The 21 DMD eigenvalues in the complex plane. Points near the unit circle are persistent modes.
$|\lambda| < 1$: decaying
$|\lambda| = 1$: neutral
$|\lambda| > 1$: growing
$\angle\lambda$: oscillation frequency
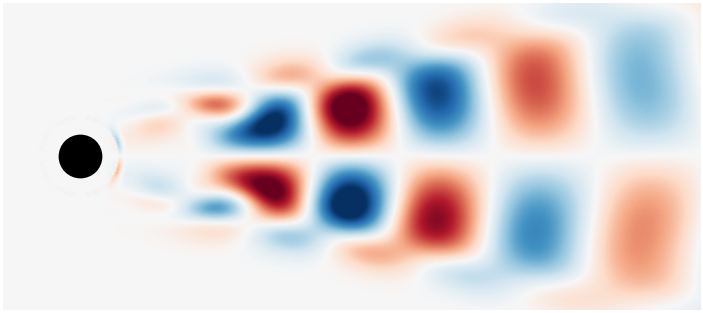
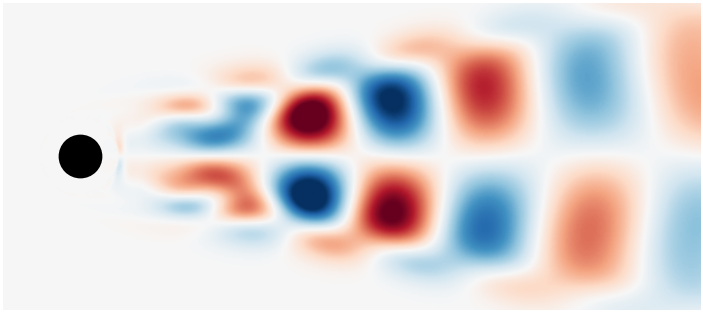
DMD Spatial Modes
The columns of $\Phi$: each mode captures a coherent spatial oscillation pattern.


DMD Temporal Dynamics
Each mode oscillates at its own frequency: $b_i\,\lambda_i^t$
The eigenvalue $\lambda_i$ determines that frequency exactly.
SVD vs DMD: Comparing Modes
How do the temporal modes from SVD and DMD compare?
SVD temporal modes ($\sigma_i \mathbf{v}_i^T$)
DMD temporal modes (Re($b_i \lambda_i^t$))
• Orthogonal
• Maximize captured variance
• Can mix multiple frequencies per mode
• Not necessarily orthogonal
• Each mode has a single frequency
• Dynamically coherent structures
DMD Reconstruction
How many modes do we need for a good reconstruction?
Original snapshot at $t=100$
DMD reconstruction at $t=100$
Beyond Dynamic Mode Decomposition
For a nonlinear system $\dot{\mathbf{x}} = \mathbf{f}(\mathbf{x})$, let $F$ be the flow map that advances the state one step: $\mathbf{x}_{k+1} = F(\mathbf{x}_k)$.
For any scalar observable $g(\mathbf{x})$, the Koopman operator advances it:
| DMD | SINDy | |
|---|---|---|
| Assumes | Linear dynamics | Sparse nonlinear |
| Method | Spectral decomp. | Sparse regression |
| Output | Global modes | Local equations |
| Scales to | Very high dim. | Low-moderate dim. |
SINDy (Lecture 8) finds sparse nonlinear equations.
Summary
Eigenvalues of $A$ control growth, decay, and oscillation. Each mode evolves independently.
4 steps: SVD → project → eigendecompose → recover modes.
From each $\lambda_i$: frequency $\omega_i = \angle\lambda_i$ and growth/decay from $|\lambda_i|$.
Data-driven decomposition: $\mathbf{x}(t) = \sum b_i \lambda_i^t \boldsymbol{\phi}_i$.
Ref: Schmid (2010), J. Fluid Mech. | Brunton & Kutz (2019) Ch. 7